
The government from Switzerland 🇨🇭 approved a new regulation for Automated Driving for the following Use Cases:
- Automated Driving with Driver Take Over
- Autonomous Parking without external monitoring
- Autonomous Driving for Last Mile Vehicles on dedicated roads without external monitoring.
The full regulation can be found here: Verordnung Automatisiertes Fahren
The most interesting part when such a regulation is approved, who takes the responsibility?
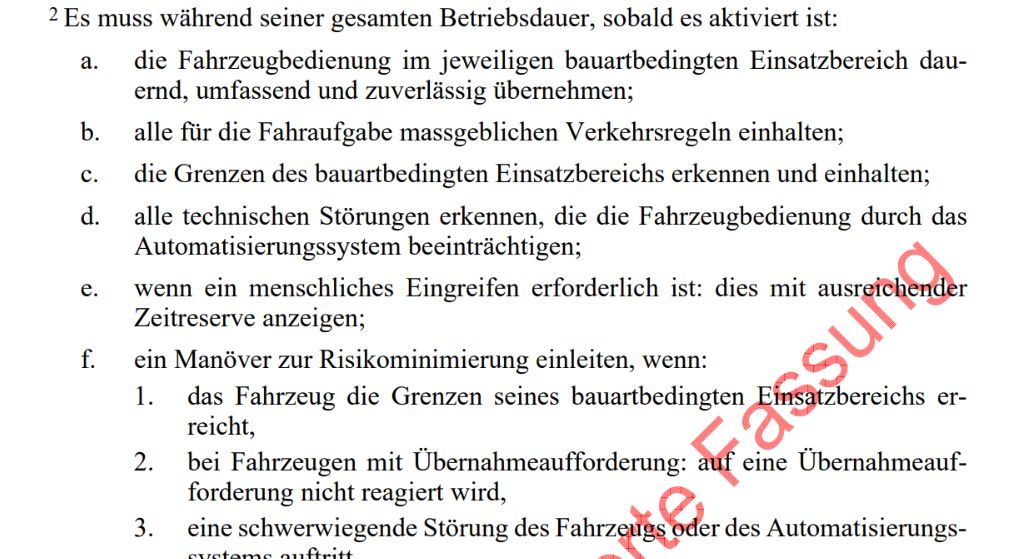
The vehicle must fulfill the following requirements during operation as soon as it is activated:
- Take over the vehicle operation comprehensively and reliable
- Act according to the rules of the road
- Detect and comply with the operational limits of the vehicle.
- Detect all technical disturbances that affect the vehicle operations
- Inform the driver with an appropriate reaction time, when driver interaction is required.
- Start a risk mitigation maneuver, when the vehicle reaches its designed limits or the driver does not react or a technical disturbance occurred.
Technically speaking the Automated Driving System under this regulation needs:
- a monitoring system to detect design limits and technical disturbances.
- a backup system that operates the risk mitigation maneuver.
You can now imagine hundreds of different E/E Architectures to to connect the systems and their components with each other. But how should that work without reliable bus systems?
Today’s bus systems are not reliable. No matter, if you discuss CAN, Flexray, or Automotive Ethernet. None of the current communication stacks guarantees that messages are sent and received.
Reliability is usually realized by heartbeat messages. But for the requirements of the 🇨🇭 Automated Driving Regulation, the heartbeat approach is too slow or consumes too much bandwidth.
To solve this challenge a much more low level and hardware based reliable messaging approach is needed for the in-vehicle communication between the systems.
